Albert Gassol Puigjaner
Home
About
Research
Publications
Research
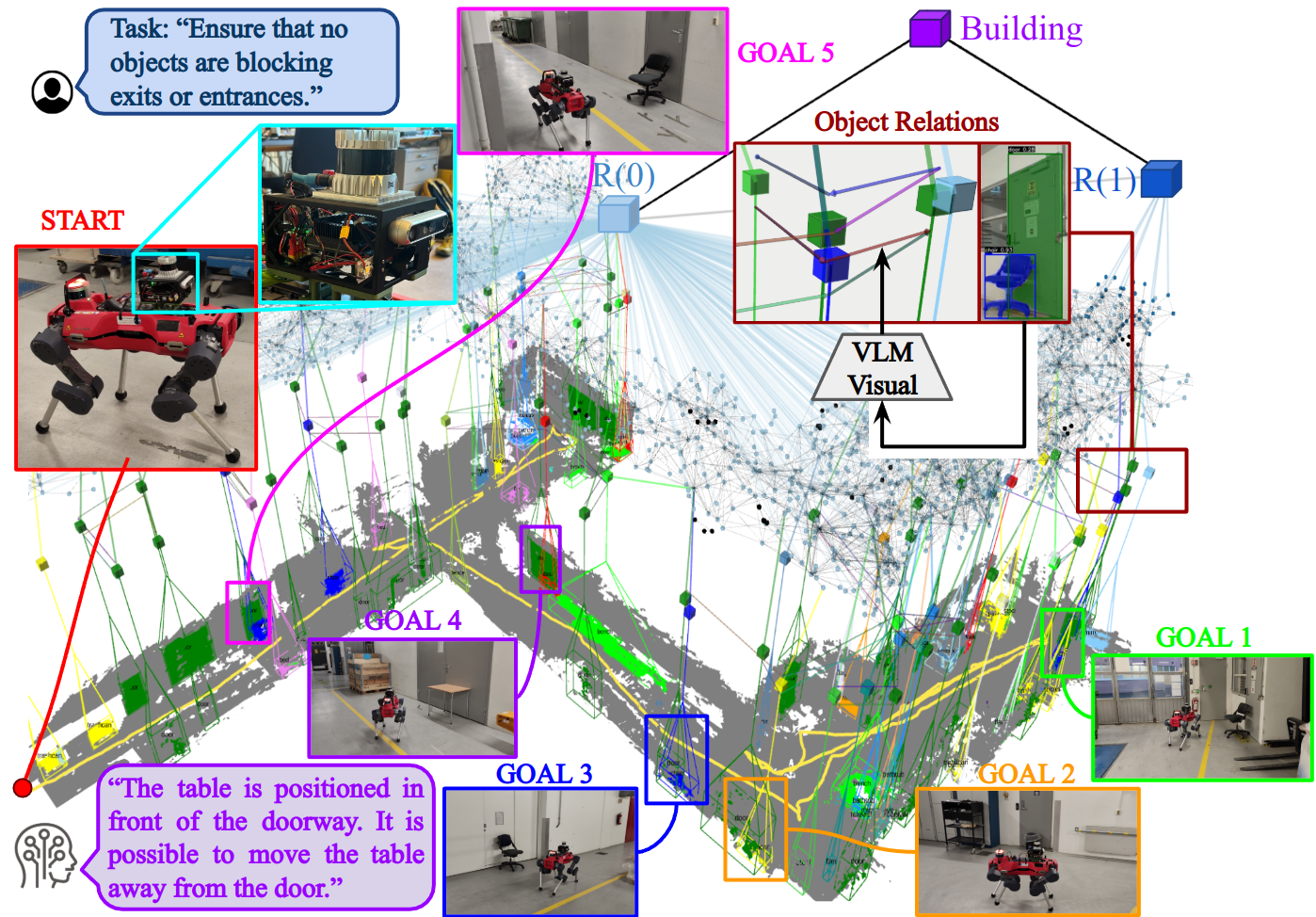
Relationship-Aware Hierarchical 3D Scene Graph
WEBSITE
PAPER
GITHUB
DATASET
VIDEO
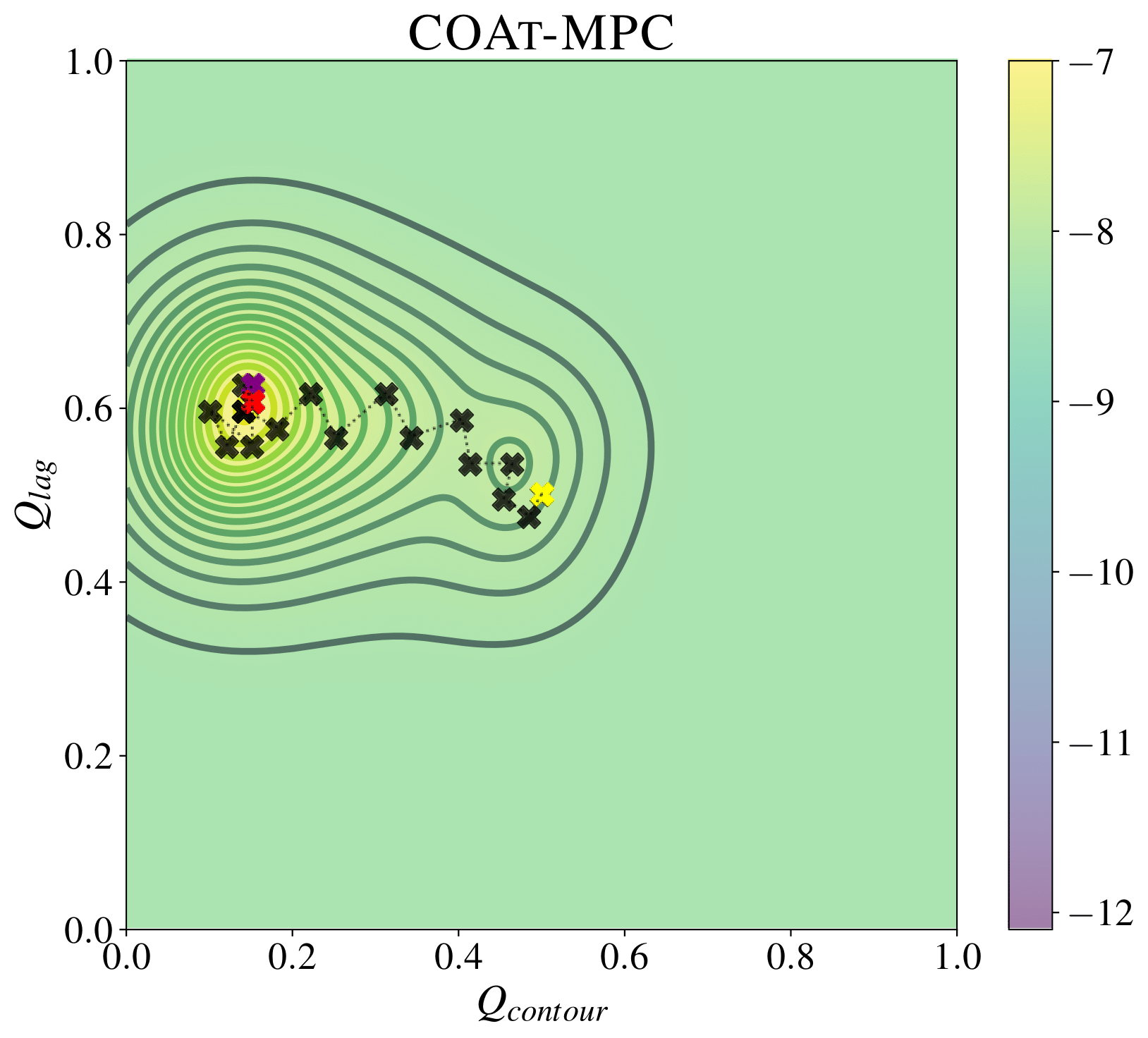
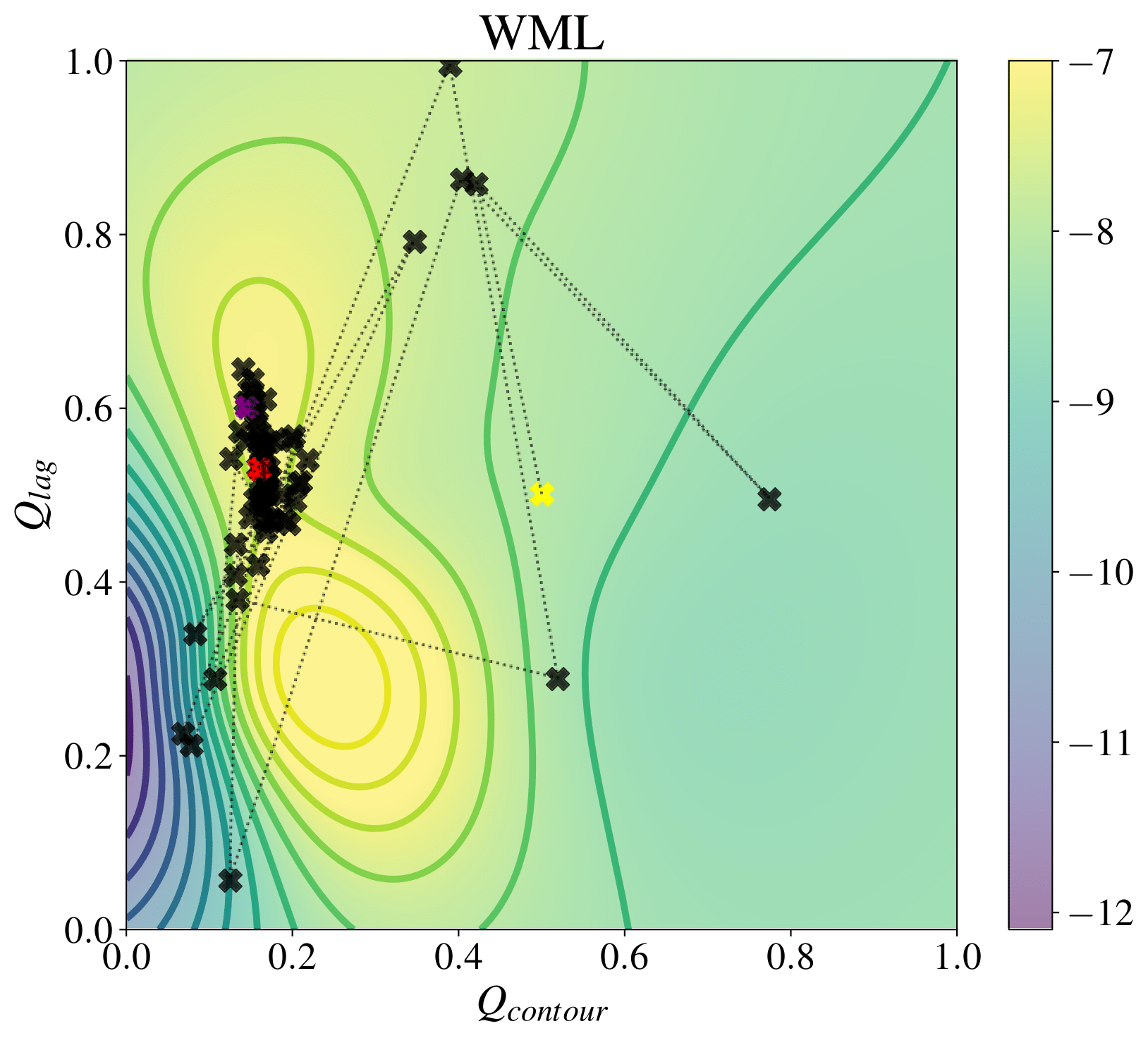
Performance-driven Constrained Optimal Auto-Tuner for MPC
WEBSITE
PAPER
ARXIV
GITHUB
THESIS
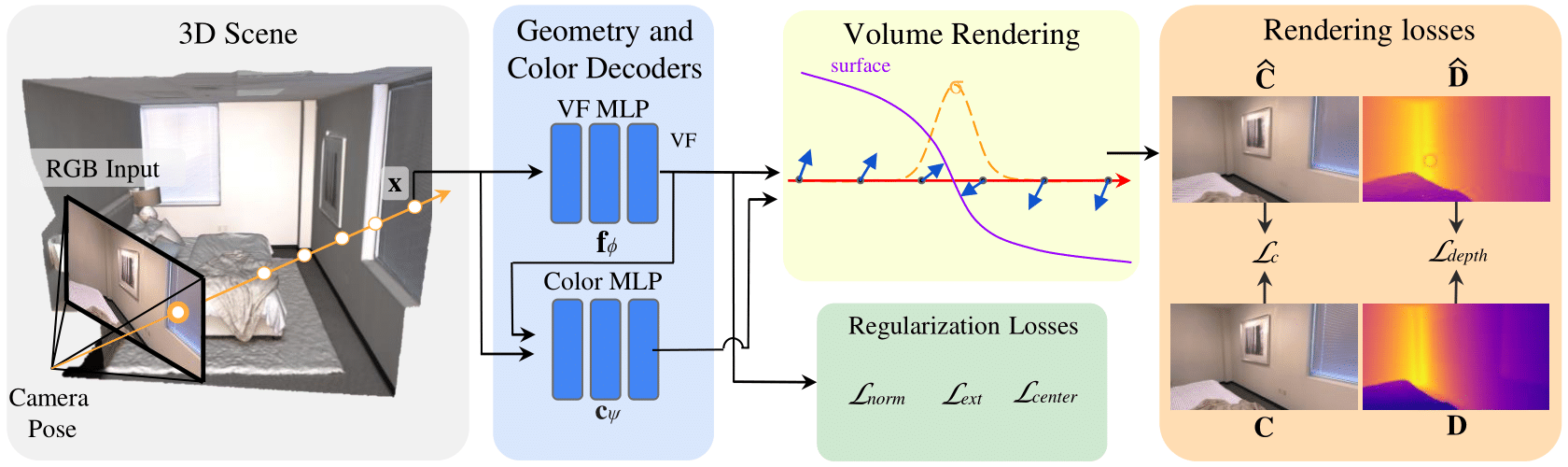
VF-NeRF: Learning Neural Vector Fields for Indoor Scene Reconstruction
ARXIV
GITHUB
THESIS
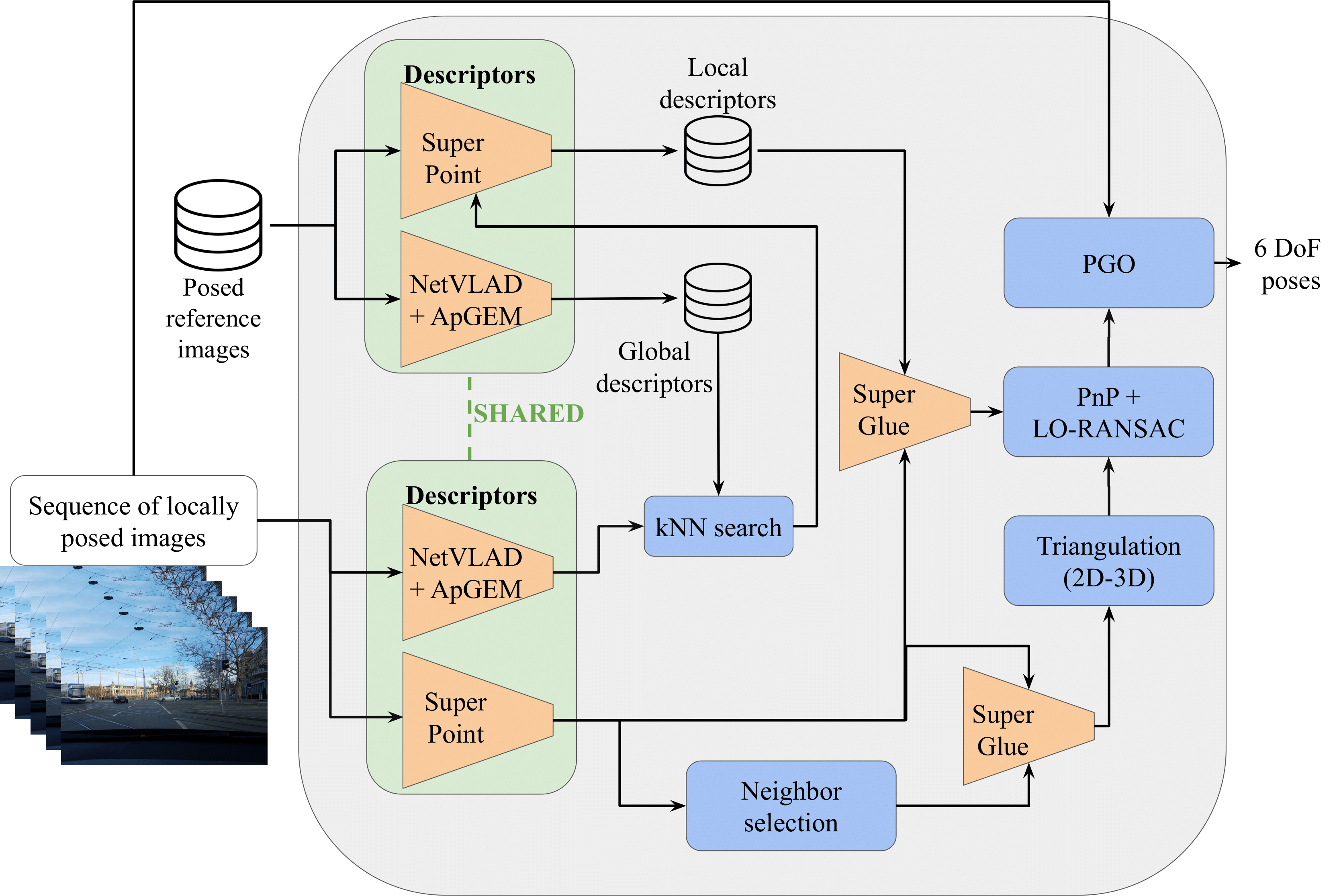
Augmented Reality without Borders: Achieving Precise Localization Without Maps
ARXIV